
Protokoły rutingu i topologie sieci sensorowych
Trasowanie, inaczej ruting to proces wyznaczania trasy przesyłowej danych w sieciach informatycznych. W przypadku sieci sensorowych trasowanie jest procesem bardzo złożonym. W odróżnieniu od sieci komputerowych i komórkowych, bezprzewodowe sieci sensorowe są aplikacyjno-zorientowane, a wymagania im stawiane są zależne od aplikacji w której są wykorzystywane. Moc obliczeniowa i zasoby energetyczne sensorów są niezmiernie ograniczone, a ich liczba w pojedynczej sieci może być ogromna. Między innymi z tych powodów stosowanie klasycznych protokołów komunikacyjnych z sieci typu komputerowych, czy też sieci telefonii komórkowej jest niemożliwe.
Protokoły rutingu można podzielić na trzy zasadnicze grupy ze względu na: zestawienie ścieżki transmisyjnej, strukturę sieci (topologię) i inicjatora komunikacji. Schemat podziału protokołów przedstawiono na rys. 2.8 [14].
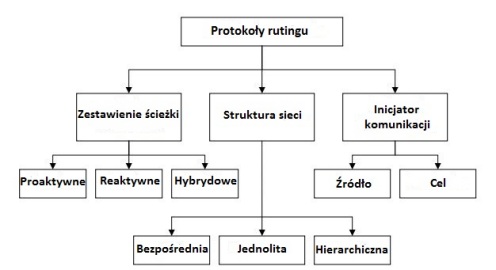
Rys. 2.8: Podział protokołów rutingu [14].
Zestawienie ścieżki transmisyjnej:
Proaktywne protokoły rutingu – ścieżka transmisyjna wyznaczana jest przed transmisją. Węzły przechowują ścieżki w tablicach rutingu.
Reaktywne protokoły rutingu – ścieżka wyznaczana jest dynamicznie w momencie inicjalizacji transmisji, a także w czasie jej trwania.
Hybrydowe protokoły rutingu – łączą cechy protokołów proaktywnych i reaktywnych. Ścieżki są wyznaczane przed transmisją i zapisywane w tablicach rutingu, ale mogą być także zmieniane dynamicznie w trakcie transmisji.
Struktura sieci:
Bezpośrednia struktura sieci (ang. Direct) – Komunikacja w strukturze bezpośredniej polega na bezpośrednim połączeniu każdego sensora z węzłem nadrzędnym. Jest to najmniej korzystna struktura sieci, gdyż każdy sensor musi znajdować się w zasięgu węzła nadrzędnego. Rodzi to problemy przy komunikacji z sensorami położonymi na krańcach sieci. Struktura sieci bezpośredniej przedstawiona jest na rys. 2.9.
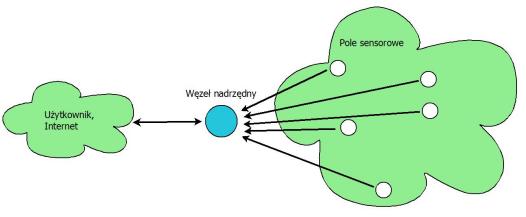
Rys. 2.9: Bezpośrednia struktura sieci.
Hierarchiczna struktura sieci (ang. Hierarchical) – sieć podzielona jest na tzw. klastry. W każdym klastrze wyznaczony jest węzeł główny, z którym to komunikują się pozostałe węzły należące do klastra. Węzły główne jako jedyne komunikują się z węzłem nadrzędnym. Struktura sieci hierarchicznej przedstawiona jest na rys. 2.10.
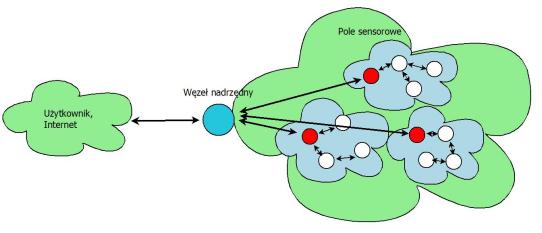
Rys. 2.10: Hierarchiczna struktura sieci.
Jednolita struktura sieci (ang. Flat) – Jest to struktura w której wszystkie węzły w sieci traktowane są jednakowo i komunikują się na równych prawach, rys. 2.11. Każdy węzeł pełni podwójną rolę – rutera (przekazuje dane dalej położonych sąsiadów) i sensora (przesyła własne dane pomiarowe). Można zauważyć iż aktywność węzłów położonych bliżej węzła nadrzędnego jest wyższa niż węzłów położonych dalej.
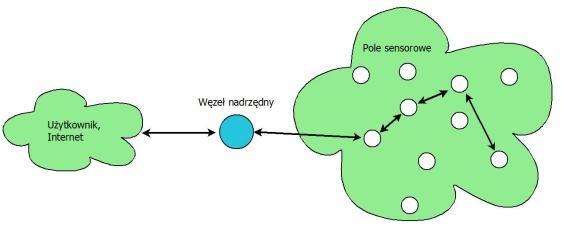
Rys. 2.11: Jednolita struktura sieci.
W przypadku kiedy dany sensor znajduje się poza zasięgiem pozostałych węzłów, a rozszerzanie sieci nie jest opłacalne, zastosować można urządzenie pełniące funkcję regeneratora sygnału (ang. Repeater).
Inicjator komunikacji:
Protokoły inicjowane przez źródło – transmisja danych do węzła nadrzędnego następuje tylko wtedy gdy sensory dysponują danymi pomiarowymi. Informacje z danymi pomiarowymi mogą być transmitowane co pewien określony z góry czas (ang. Time-driven), bądź też w odpowiedzi na zaprogramowane zdarzenie, np. wzrost temperatury powyżej pewnego progu (ang. Event-driven). Tryb ten można utożsamiać ze znanym modelem komunikacji Klient - Serwer (ang. Client - Server).
Protokoły inicjowane przez cel – Węzeł nadrzędny odpytuje określone sensory (ang. Query-driven), w wyniku czego otrzymuje odpowiedź z danymi pomiarowymi. Wadą tego typu protokołów jest duży narzut na sieć – zapytanie propaguje się poprzez wszystkie węzły w sieci (ang. Flooding). Tryb ten można utożsamiać ze znanym modelem komunikacji Master - Slave.
komentarze
Copyright © 2008-2010 EPrace oraz autorzy prac.